Sprint Mechanics
Fundamentals of Sprint Mechanics
The most critical aspect of sprinting is the relationship between stride length and stride frequency.
Sprinting is defined through the interaction of mechanical principles and fundamentals of speed. Speed, often statistically analyzed by a measurement of individual velocity, is the relationship between distance and time. The basic goal of a sprinter is to cover a specified distance in the shortest amount of time, therefore, achieving the highest possible velocity. Olympic sprinters such as Ben Johnson and Carl Lewis are able to achieve competitive velocities of 12.04 meters per second. Within a 100 meter sprint, velocity is accomplished through cyclical mechanics of “reaction, acceleration, and frequency” (Joch, 2008).
The most critical aspect of sprinting is the relationship between stride length and stride frequency. Overall sprint velocity is determined by this relationship and must acutely be in focus during all training and sprint performances. For overall velocity to increase and subsequent performance time to decrease, factors of stride length, stride frequency, or both must increase. Given the relationship between stride length and stride frequency, it is important that an “increase in one factor in not ‘canceled out’ by a similar or greater decrease in the other factor.” A net increase in stride length may correspondingly result in a net decrease in stride length, consequently slowing down an athlete. With the inverse being equally true, a balance between the two factors is critical. For purposes of identification, taller athletes typically display a shorter stride frequency as a result of an increased stride length (Hunter, Marshall, & Mcnair, 2001).

Determining an appropriate balance between stride length and stride frequency lies in the trochanter length of an individual athlete. Trochanter length is identified by measuring the distance between the greater trochanter of the femur and the base of the foot or floor (Segal, et al., 2008). The measurement of the trochanter can be used to determine optimal stride length by calculating a minimum to maximum range and how it relates to proper individual mechanics. According to Tony Wells, optimal stride length should range from a a minimum of 2.35 multiplied by the trochanter length to a maximum of 2.50 multiplied by the trochanter length.
Youth athletes should typically experience a stride length close to the minimum edge of the range, whilst elite athletes will experience a stride length closer to the maximum edge of the range. Further, female athletes should experience an optimal stride length closer to 2.35 multiplied by their trochanter length and male athletes should experience an optimal stride length closer to 2.50 multiplied by their trochanter length.
The precise stride length of an individual athlete can be calculated through video analysis and the determination of how many steps were taken within a given distance. From this information, a coach can determine if an athlete is over or under-striding and consequently, is able to take appropriate measures if needed. For more information and how to calculate an athletes stride length and stride frequency, Click Here to visit the testing page (Wells, Smith, & Taylor, USATF Development Project 1, 2001).
In addition to utilizing factors of stride length and stride frequency in determining individual sprint mechanics, factors of, “center of mass at takeoff, height of takeoff, vertical velocity of touchdown and takeoff, and leg angle range-of-motion” must be taken into consideration. As these factors are interconnected with stride length and stride frequency, a deviation from the norm in any single factor can cause abnormal sprint mechanics and a non-optimal sprint performance. Position of the center of mass in relation to touchdown and takeoff may cause a deviation in neutral positioning of the hip. An overall increase or decrease in height of takeoff from a neutral and stiff position may cause a decrease in both stride length and stride frequency. Similarly, inadequate action and range-of-motion in the lower limbs and a decrease in velocity during touchdown and takeoff may also cause a decrease in stride length and stride frequency (Hunter, Marshall, & Mcnair, 2001).
Common Stride Deficiencies—and How to Fix Them
1. Hip Posture (Anterior Tilt)- Problem: Anterior rotated hips—hips rotated forwards.
Issues and Effects:
Limits ability to produce proper front-side mechanics and limits thigh and hip-flexor mobility.
Limits body’s ability to create adequate and proper stretch reflex—limited power access.
Produces excess strain and tension on lower back, glutes, and hamstrings along posterior chain.
Solutions:
Enforce neutral hip posture during every component of practice and competition.
Demonstrate to each athlete what a “hip neutral” position looks and feels like.
Cue Before Running:
“Stand up tall, hands in the air—set hips high and underneath you.”
Cues While Running:
“Hips up tall”, “Hips underneath you”, and “Pull your belly-button into your back.”
Corrective Drills and Exercises:
A-skips, B-Skips, C-Skips, high knee skips, butt kicks, etc—for more information Click Here.
(Neumann, 2010)
2. Casting- Problem: Touchdown is in front of the hip in the stance-phase of a sprint.
Issues and Effects:
Casting is the result of improper sprint mechanics—having a shuffle or swinging motion or the result of pushing down with quadriceps and hip flexors instead of pulling down with hamstrings and glutes.
Also the result of “reaching” for next step and not staying “up tall” and within proper mechanical boundaries.
Result is the creation of a breaking force during acceleration, maximum velocity, and deceleration phases of a sprint.
Solution:
Emphasis on “paw-back” or “pulling back” motion during each phase of the sprint. Athlete should be pawing-back against the track and not merely placing their foot down or reaching ahead of the hips/body.
Cues While Running:
“Land underneath your hips”, “Land underneath your body”, “Don’t reach", and "Paw-back."
Corrective Drills and Exercises:
A-Skips, B-Skips, C-Skips, straight leg bounds—for more information Click Here.
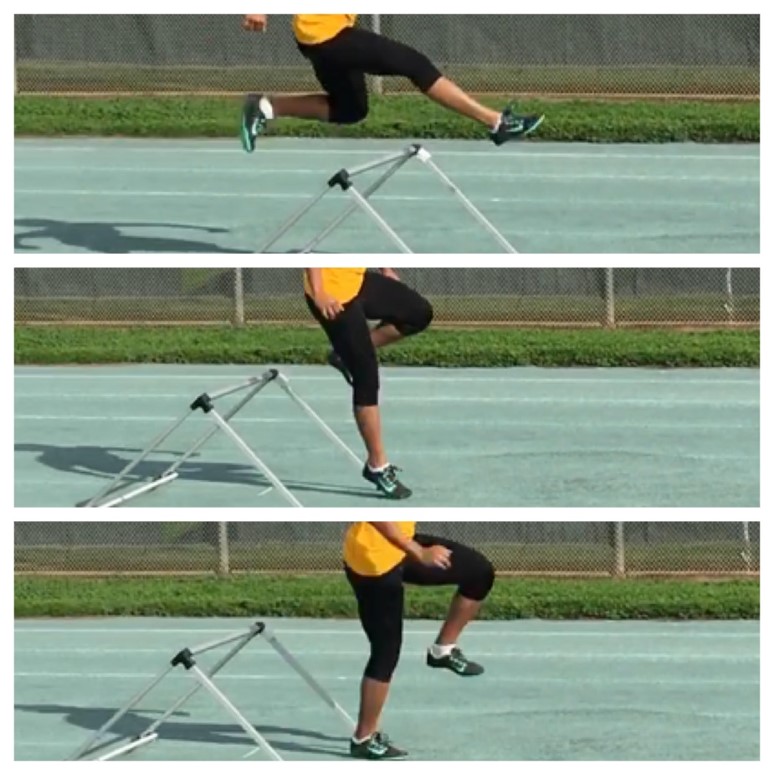
Shorter-than drill— sprints through sticks spaced shorter than an athletes ideal stride length with an emphasis on listed cues. For more information Click Here.


3. Issues of Plantarflexion- Problem 1: Athlete is not dorsiflexing off the ground following the stance-phase of a sprint. Problem 2: Athlete is not dorsiflexing or is plantarflexing in preparation for stance-phase of a sprint.
Issues and Effects 1:
Increases overall backside mechanics and increases strain on the posterior chain during the swing phase.
Limits an athletes abilities to powerfully pull off the ground and step up and over the inside of the knee—creates a swinging motion.
Solution:
Visually demonstrate to athlete proper dorsiflexion during each phase of a sprint.
Cues While Running:
“Heel up, Toe up, Knee up.”

Issues and Effects 2:
Causes a decrease in physical power transfer into the track.
Plantarflexing during initial contact will lead to a breaking force into the track and a collapsed foot/ankle/leg upon contact.
Solution:
Point and demonstrate what ankle stiffness is, the effects of touching down plantarflexed, and the effects of maintaining a dorsiflexed foot and ankle.
Cues While Running:
“Stiff ankles” and “Pull your ankle into your shin.”
Corrective Drills and Exercises:
Lower body mobility and strengthening —lower body complex, shin splint drills, etc.
4. Joint Stiffness—"Mushing Out"- Problem: A mushing out of the joints or a general lack of joint stiffness in the lower extremities will cause a diminished power output.
“A force is required to stretch or compress the spring and thus the stiffness can be calculated from the ratio of this force to the change in spring length (Shepherd, 2014)."
Issues and Effects:
Greatly decreases the transfer and maintenance of energy between the track surface and the athlete.
Cues While Running:
“Keep your hips up tall” and “Don’t mush out.”
Corrective Drills and Exercises:
Plyometrics—hops, depth jumps, ascent jumps and resisted exercises—sled pulls

5. Arms/Torso Asymmetry and Rotation- Problem: Arm swing crosses the sagittal plane of the body creating a torso rotation and hip oscillation.
Issues and Effects:
Torso rotation and hip oscillation will create a breaking force and a lack of control over individual mechanics.
“Arm swing plays a vital role in both stabilizing the torso and vertical propulsion. Regarding torso stabilization, arm swing serves to counterbalance the rotational momentum created by leg swing (Hinrichs, 1987)."
Solution:
Emphasize ‘good’ arm motion during every facet of practice and competition (warmup, drills, and sprints)
Cues While Running:
“Tight core”
Corrective Drills and Exercises:
Extra core work, medball circuits, and bodybuilding circuits